
时隔一年半,Uber的自动驾驶致死事故总算迎来了结局。
美国全国运输安全委员会(NTSB)在昨天凌晨召开听证会,全面公布了事故的各种细节,并且对这次事件给出了最终的结论——Uber、自动驾驶安全员、行人、当地政府、自动驾驶管理机构,都有责任。
NTSB官员还专门指出:从最终的占比来看,整起事故中人类仍是最主要的责任方。
这一结论,明显与此前大家只关注Uber的技术缺陷,声讨其安全驾驶员玩忽职守不同,NTSB经过长时间调查研究之后得出的的结论其实指出了自动驾驶安全性的关键性问题——在自动驾驶走向成熟的过程中,人类肩膀上的责任很可能不降反升。
这对于人类接下来在自动驾驶领域中的探索,以及人类对待前沿技术的方式上,都将产生深刻的影响。
先回归案件本身
2018年3月18日晚上,一辆Uber自动驾驶测试车辆在亚利桑那州坦佩市的既定测试路线上行进,在车速45英里的状态下,行人开始推着自行车横穿马路,多种原因作用下,Uber自动驾驶车并没有选择减速,车上的安全员也没有踩下刹车,汽车最终以39英里的速度撞向行人,直接导致行人死亡。
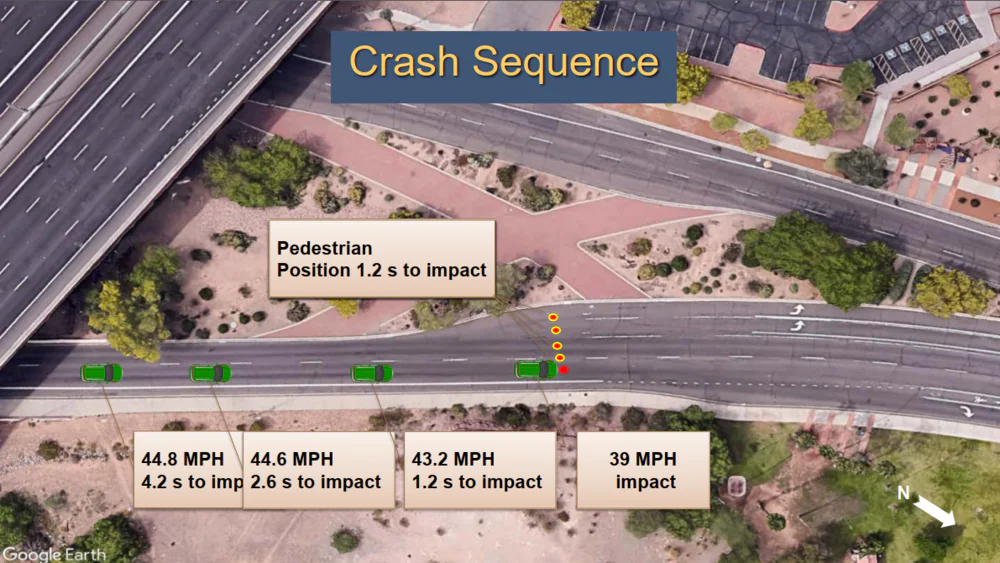
事故现场和车速关系图
大部分的技术细节之前很多相关报道中已经提到,Uber的自动驾驶技术方案,除了外观好看以外的确有非常多有缺陷的地方,其中一个就是系统虽然在碰撞前5.6秒就探测到了“行人+单车”这一障碍物,但是因为事发路段照明不良,基本只能靠激光雷达的数据来识别物体。
结果如下图中的过程所示,遇害者在整个过程中先被识别为“静止车辆”、然后变成了“静止单车”和“其他物体”,最后又重新变成了“静止单车”。这样的跳跃直接反应了两点:一是Uber自动驾驶算法中并没有解决单个物体的持续性检测和跟踪问题,其次糟糕的照明条件的确也能对自动驾驶车辆的探测能力形成负面影响,即便装备了高清激光探测,依旧无法百分百判断对障碍物的种类。
不到6秒的时间里,行人被识别成了6中不同状态的对象
更糟糕的是,Uber这套系统默认针对不同的障碍物有不同的解决方案,因为检测系统的结果不断波动,直接导致电脑将整个事故过程分为了几个小段,降低了分析对象运动的能力。
当然,受害者本身也并不是一点责任都没有。从NTSB公布的资料来看,受害者当天穿着黑色上衣、牛仔裤,推着一个车灯不算太亮的自行车,直接在马路上横穿了三条车道。根据药理学的分析,她很可能还使用了大麻等其他一下有可能影响人类大脑工作的成瘾物质。
NTSB也从更加全局的角度给出了他们的结论:
自动驾驶安全员:没能监控道路和自动驾驶系统,在整个行程中都被手机分散了注意力。NTSB证实,当晚她有在Uber车上的34%时间,都是在低头看手机。最后一眼发生在撞击前6秒,持续5秒钟之后,也就是最后一秒,她才重新开始观察路面情况;
Uber自动驾驶部门:安全风险评估程序不足,公司没有专门的安全管理人员负责风险评估和缓解;
Uber:没有解决人类安全员的“自动驾驶自满”问题,在整个监督自动驾驶工作非常枯燥的情况下,应该用一个适当的系统来确保司机不会过度自满;
遇害者行人:体内被发现有甲基苯丙胺,之前很可能吸食了毒品,进而对其判断力和思考产生影响;
亚利桑那州政府:对于自动驾驶在公共道路的测试规章仍不够完整。
自动驾驶,是个更操心的存在
是不是感觉却了点什么?那是因为我们专门把自动驾驶安全员留到了最后来讲。在Uber这起事故中,自动驾驶安全员是唯一能够阻止事故发生的角色(因为行人大概率注定横穿马路,而Uber的自动驾驶技术在那个时候注定不完善)。
很可惜,结果是自动驾驶安全员玩忽职守了。
正如NTSB在上面提到的那样,那位车上的自动驾驶安全员“自满”了。本来应该盯紧路面的她,选择了偷偷将自己的手机放在中控台的下方,这样子他就能时不时看看自己最喜欢的电视节目。她这样做似乎也有底气,这条路线她已经走了70多次,当天也已经完成了一整圈,没有遇到任何的问题。反正车都是自己会开的,自己也不需要操作,那么偶尔看个电视节目放松下,岂不美哉。

这种“自满”的情绪,源头其实是人类对于机器的依赖,人类生活中越来越多的空间和时间被科技所创造的机器所占领,他们相比人类自动化程度更高,因此能不知疲倦地替人类完成许多任务。在人类的设想中,自动驾驶车辆应该也是这样一类产品。
但现实显然是残酷的,Uber在发生致死事故之前,在同样的地点周围曾发生过46起大大小小的事故。目前自动驾驶的领头羊Waymo已经向公众开放服务,但也被爆出了很多使用问题:例如车没有开到预定的上车地点、行进过程中速度过于缓慢,无法适应人类驾驶员的“老司机”操作等等。
这其实还是我们今年年初聊过的那个问题:目前整个自动驾驶业界所选择的道路,理想状态下也只能打造出比肩人类,或者是在细节上略微超越人类的自动驾驶系统。但这种水平距离里人们所期待的仍有差距。
理论上来说,自动驾驶车辆的确“不那么容易”发生事故,但在别的车辆、道路环境异常,例如致死事故中这种突然横穿马路的情况,依然可能有不好的事情发生。

另外一种操作:用两个水瓶规避特斯拉的方向盘检测
但跟人类自己掌握方向盘驾驶不同,自动驾驶会先天给人一种“不好的事情很难发生”、“我警惕周围的道路情况也没什么用,因为不是我开”的心理状态。现实中,曾有不少车厂推出了包含“防自满”的技术手段,结果车主们很快就对症下药,找出了破解的方法。典型的事例就是特斯拉的方向盘握持检测,不少车主为了规避这个功能都在车上备了网球,专门用来夹在方向盘上。
按照这个趋势发展,事情有可能会越来越奇怪。首先是自动驾驶车辆制造商和使用者之间的对立,制造商为了保护使用者、保护自身的品牌价值,必须要让驾驶者即便开启了自动驾驶功能,也要一直关注路面情况。而驾驶者本身选择自动驾驶就是想要逃离这份枯燥的事物,时时刻刻盯着说不定更累。双方事实上已经形成了对立,这在没有自动驾驶功能的车上是不存在的。

不过,目前Waymo在美国凤凰城的部分市区,已经进行了一小段时间完全没有自动驾驶安全员的实验。截至目前状况还算良好,起码没有听到什么交通事故。就看接下来其商业化能进展到哪个地步了。
我们也不妨大胆预测一下,Uber的这个案例必将不会是自动驾驶唯一里程碑的事故,只要一天我们没有真正普及自动驾驶,把我们自己赶下驾驶席,我们就会跟自动驾驶继续纠葛。
评论